ズゴッホ [ズゴッホ]

ズゴッホの原型完成までアップできたのでようやくこっちにも完成画像をアップできます。

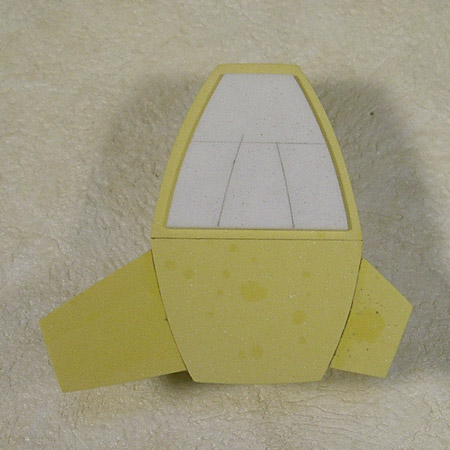
後ろ側。

本館の方でも触れてますがツメがモモに当たらないように腕をちょっと前に出すように接着しています。
腕を手の平が前に向く方向に少し回転させる方法もアリだと思うので仮組みでの調整をお願いします。

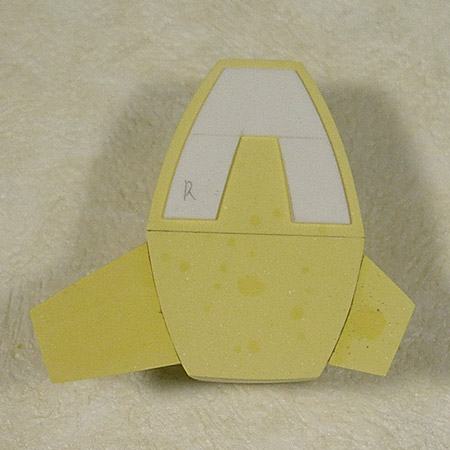
おでこのセンサー部分にいつも使っているシールが行方不明だったので、
机の引き出しにあった別のシールの切れ端を切って貼ってみました。
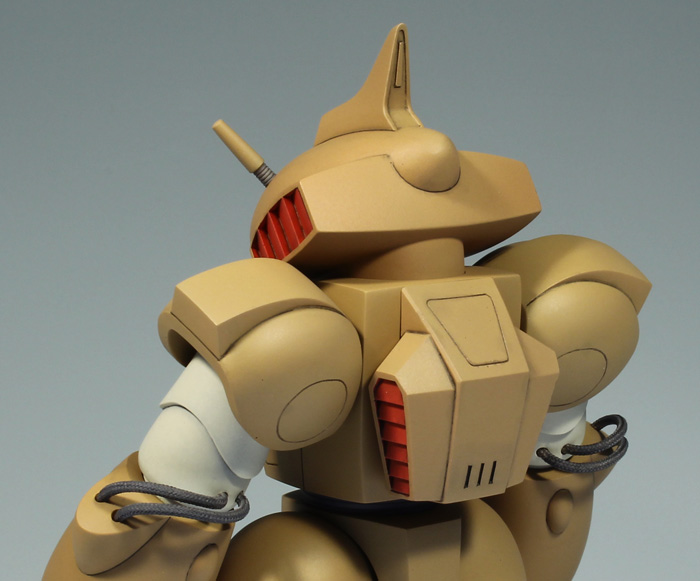
この完成見本では腕のパイプはモデラーズのラジエターホース1.7mmを使っています。
でももうこれは売ってないと思うのでほぼ同じ太さのコトブキヤのメッシュパイプの1.5mmでも大丈夫です。
パイプスプリングを使いたい場合は2mmのパイプスプリングです。

ドギルムと。
並べてみるとドギルムの反省点が見えてくる感じです。

デュラッヘと。
ARVや重機動メカは大きさに多様性があるので並べると面白いです。
ズゴッホ完成 [ズゴッホ]
撮ってた写真の編集を終えたから毎日アップしよう計画です。
デザイン的にガリアンの肩アーマーの位置決めは簡単でしたが、
ズゴッホの肩アーマーの位置決めは自由度が高すぎてどこにするかとても悩む難しいタイプです。
しかも頭とぶつからないようにという制約もあってさらに難しいです。
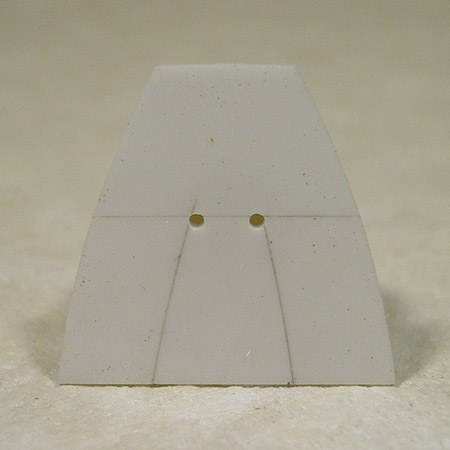
画像は悩みまくって位置を決めて1mmの穴をあけた段階です。
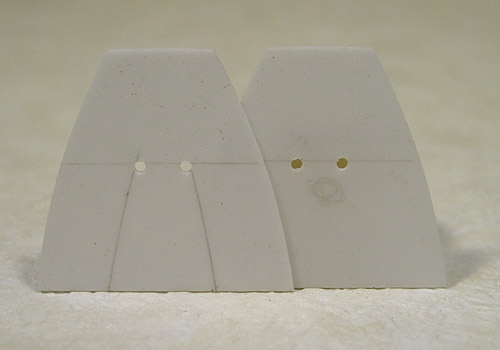
肩アーマーです。
こちらも1mmの穴をあけてから真鍮線で胴と接続してみて決めた位置が大丈夫か確認しました。
埋めた跡があるのは失敗したから埋めたのではなく、
芯にしたデュラッヘの肩アーマーが汎用肩関節の凹を使っていたからです。

決めた位置は大丈夫だったので胴に汎用肩関節の凹を埋め込み。

肩アーマーには凸を接着。
肩アーマーと上腕の関節はモーターツール旋盤で作った関節パーツを埋め込みました。

最終確認用にセロハンテープで固定してみたのがワンフェス前にアップしたこの画像。
頭と胴はほぼ同時に完成したのでこの段階では頭もサフ吹き前です。

胴完成。
肩アーマーと上腕完成。
これでズゴッホ製作完了です。

デザイン的にガリアンの肩アーマーの位置決めは簡単でしたが、
ズゴッホの肩アーマーの位置決めは自由度が高すぎてどこにするかとても悩む難しいタイプです。
しかも頭とぶつからないようにという制約もあってさらに難しいです。
画像は悩みまくって位置を決めて1mmの穴をあけた段階です。
肩アーマーです。
こちらも1mmの穴をあけてから真鍮線で胴と接続してみて決めた位置が大丈夫か確認しました。
埋めた跡があるのは失敗したから埋めたのではなく、
芯にしたデュラッヘの肩アーマーが汎用肩関節の凹を使っていたからです。

決めた位置は大丈夫だったので胴に汎用肩関節の凹を埋め込み。

肩アーマーには凸を接着。
肩アーマーと上腕の関節はモーターツール旋盤で作った関節パーツを埋め込みました。

最終確認用にセロハンテープで固定してみたのがワンフェス前にアップしたこの画像。
頭と胴はほぼ同時に完成したのでこの段階では頭もサフ吹き前です。

胴完成。

肩アーマーと上腕完成。
これでズゴッホ製作完了です。
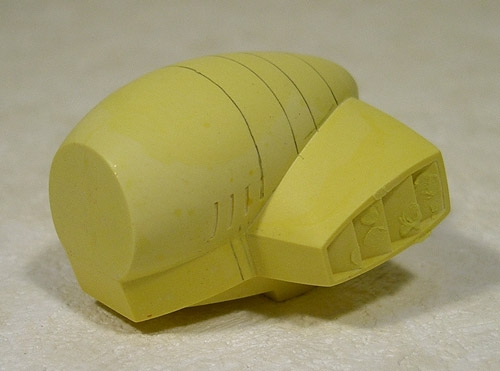
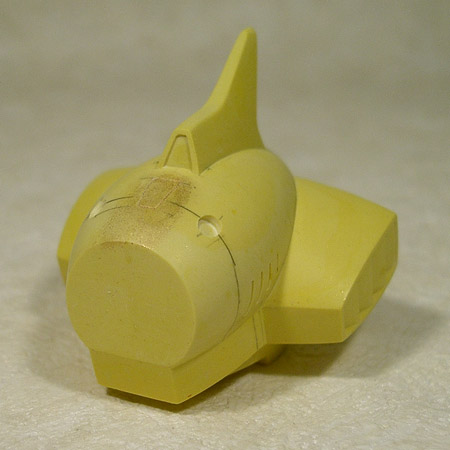
頭完成 [ズゴッホ]

口の部分です。

頭につけたらこんな感じ。

セロハンテープを貼ってから鼻みたいな部分のパテ盛り。

形を出しました。

頭につけて目を描いてみた図。

スジ彫りしました。

パイプです。
モーターツール旋盤で形を出した後で中心にピンバイスを当てて穴をあけてから切り出し、
ドライヤーで熱して軽く曲げてから同じカーブに曲げておいた真鍮線を通してカーブを固定しました。
(ピンバイスを当てて穴をあける作業はとても危険です。角度をミスるとドリルの刃折れて飛び散る恐れがあります。)

シリコーンゴム型で量産したパイプを接着。
加えて口の部分を彫ってます。

組み合わせたのがワンフェス前にアップしたこの画像。
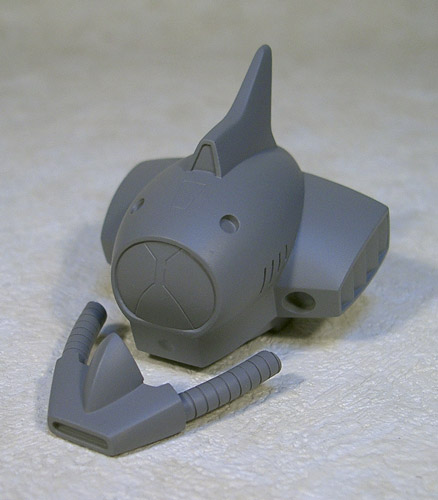
頭完成。
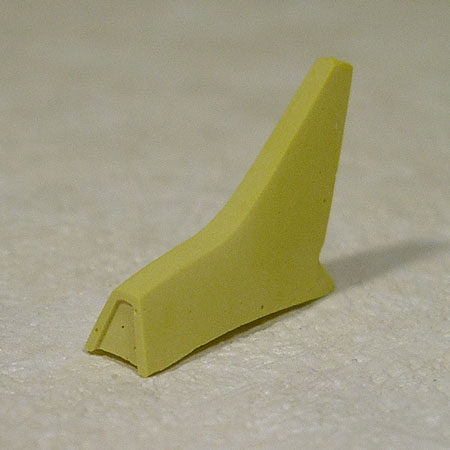
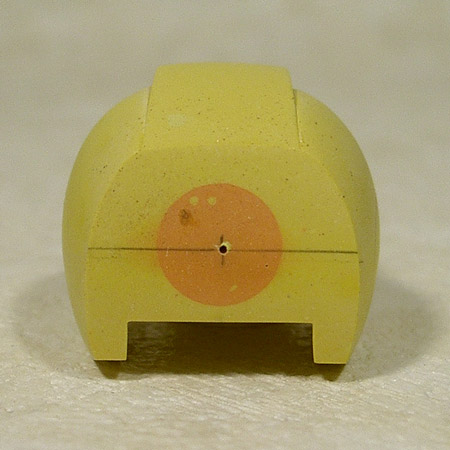
のど元 [ズゴッホ]

ワンフェス前に編集していたけどアップを控えていたらこの画像で何を言いたかったのか忘れた…
たぶん『首の関節用の穴をモーターツールで彫ったよ』という事だったかなと…

で、『胴側にも首の関節の半球を接着したよ』ですな。

以前パテを盛っていたのど元パーツを仕上げました。
ここからはちゃんと覚えています。

のど元を接着。

上の胴の画像で少し削っていた胴側ののど元が当たる部分をすり合わせながら仕上げました。

横から見た設定画ののど元の一本の線がこれで再現できました。
あと、イベントカテゴリー内にズゴッホの記事が増えまくりだったのでズゴッホのカテゴリーを追加して大移動しました。
目と口 [ズゴッホ]
おでこの部分にスジ彫りしアンテナ用の穴をモーターツールで彫りました。
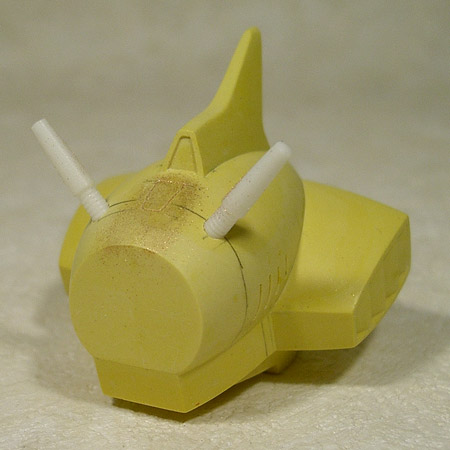
アンテナをつけてみた図。

目の部分は横から見た設定画だと微妙に湾曲しているのでそれを再現すべく目安の線引き。

わかりにくいけど削り終えました。

目の部分に進みます。

三角刀で彫り耐水ペーパーで仕上げる手順。

中央部分は盛り上がっているのでパテ盛り。

仕上げました。

トサカの後ろ側を一段低く削りました。

頭側にメンタムを塗ってから口の部分のパテ盛り。
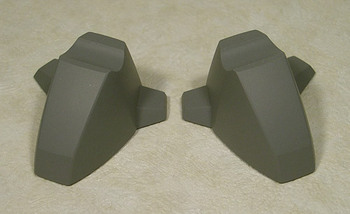
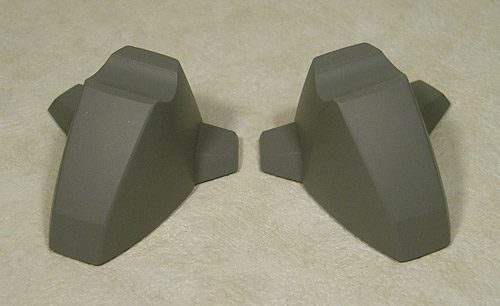
腕完成 [ズゴッホ]

まずは肩アーマーです。
ほぼ形が出せました。
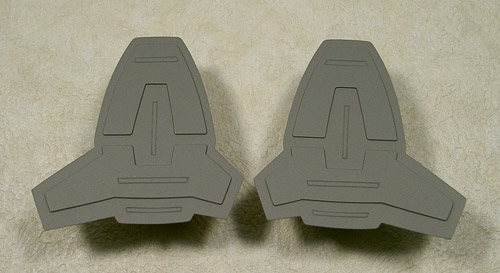
スジ彫りの目安の線引き。
ディバイダでスジ彫り。
ディバイダの穴をパテ埋め。

親指に当たるツメ用の穴を掘りました。
モモと違って微妙な左右の大きさの違いは大丈夫なので左腕はポリパテの原型をそのまま利用します。

ARVのツメは設定画でこんな風に人の指のような配置になっている事が多いのと、
これまで作ってきたARVもそのように作ったので今回も踏襲します。

パテ盛り。

形を出しました。

なんかカワイイ。

というわけでカワイイ腕完成。
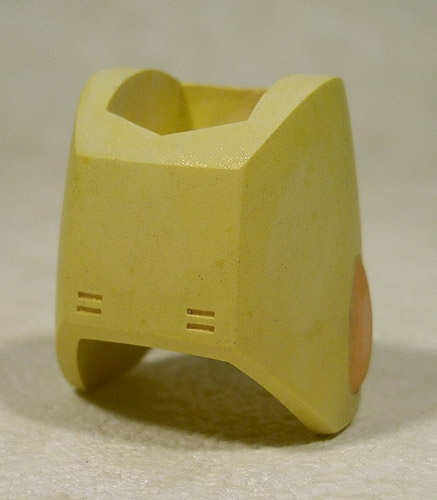
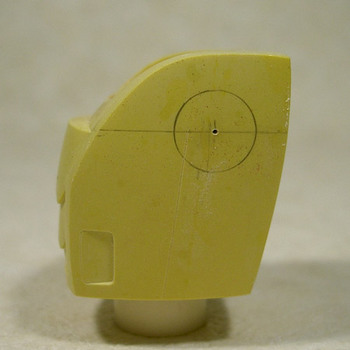
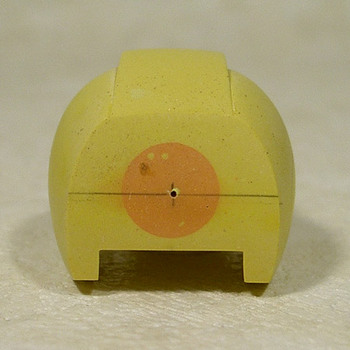
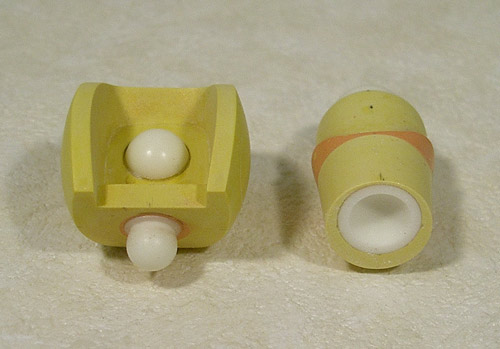
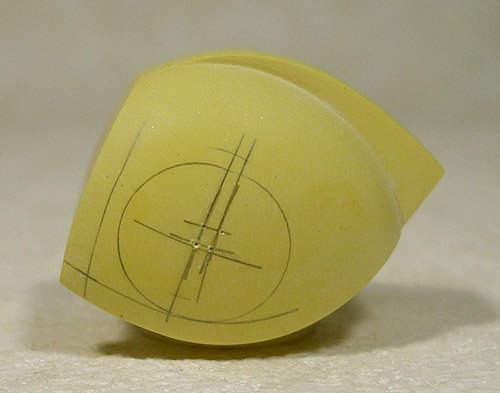
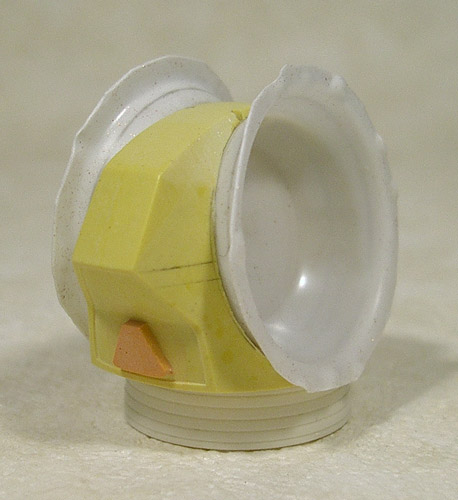
モモと腰完成 [ズゴッホ]

埋め込んだバキュームフォームパーツをきれいに仕上げた腰です。
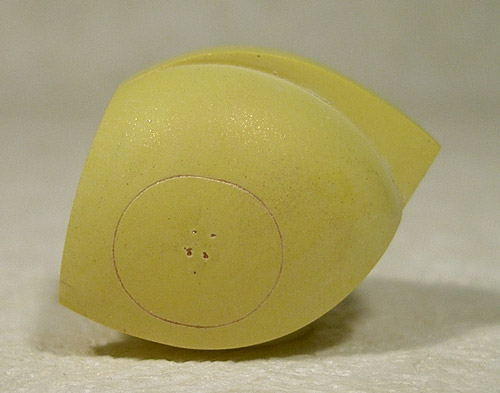
銅粉を腰側に付けて、モモを股関節があるかのように押し付けて動かすとモモ側に円形に銅粉が付きます。
この円の中心点が股関節の軸の位置となります。

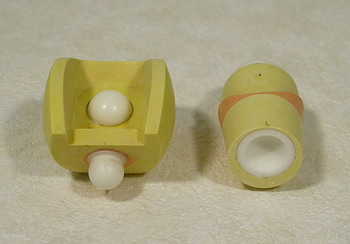
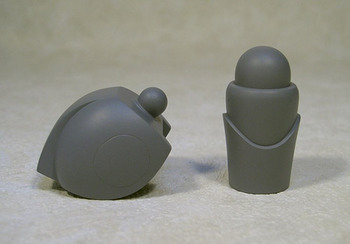
モーターツール旋盤で作った汎用股関節パーツです。
これを埋め込みます。
ブルーナイトまでは半球の凹と凸の股関節パーツを作って使ってたけど組み立てがとても難しかったので、
その反省を踏まえて生まれたボールジョイント的な股関節パーツです。

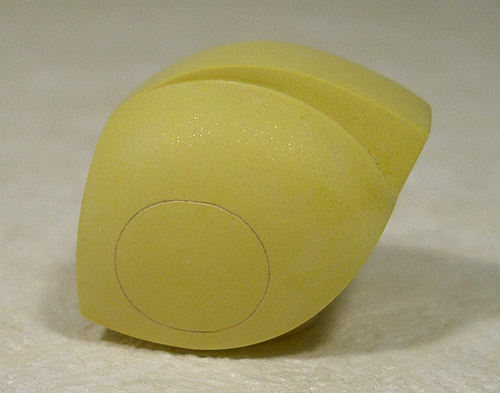
いきなり本番は危険なので予備のモモに埋め込んでテストをします。

予備のモモに汎用股関節パーツの凹を埋め込み完了。
腰側の凸は両面テープで固定。

微妙によろしくない感じです。

1.5mm程中心点の位置をずらします。

埋め込み完了。

すり合わせながら微調整。

セロハンテープで固定して様子を見た図。

大丈夫だったので腰側も接着。

モモと腰完成。
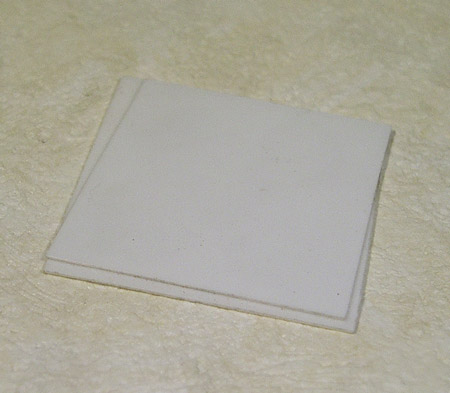
腰にバキュームフォームパーツを埋め込む [ズゴッホ]

モーターツール旋盤で作ったパーツです。

バキュームフォームでこんな感じに。
大きすぎで失敗。

作り直しました。

これなら大丈夫。
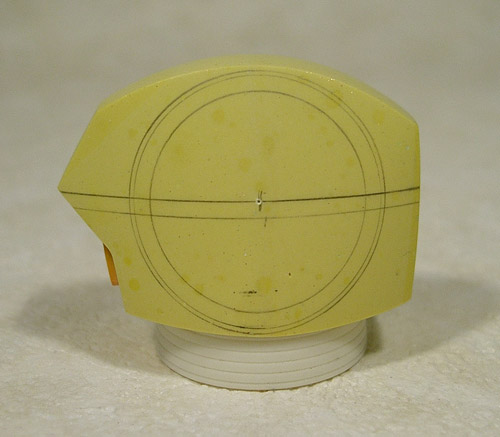
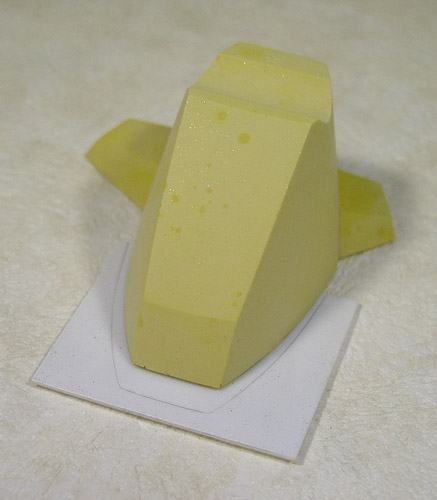
腰に埋め込むための線引き。

すり合わせながらモーターツールで掘りまくります。

バキュームフォームパーツ埋め込み。
ここで埋め込む前に股間部分を薄く削っておく計画だったのを思い出しました。

「貴重な一日分の作業が無駄になった…」とか思いつつバキュームフォームパーツを除去した図。
それほど手間がかかる事無く再接着。
腕のモールド [ズゴッホ]

腕です。
スジ彫りをする線を描きます。
何度も線を描いてはデザインナイフの刃先でカリカリと正しい線を残す感じで。

線が描けたのでツメを両面テープでつけてみて大丈夫か確認します。
で、大丈夫っぽいです。

まず三角刀で線に沿って軽く彫り、
次に目立てヤスリで三角刀のラインのヨレを修整しながら仕上げます。

メリハリがあったほうが良いと思ったのでデザインナイフと耐水ペーパーで段差をつけました。

モーターツールでツメ用の穴を彫ります。

違う角度。

ツメをつけてみた図。

以前作っていたヒジ関節パーツを組み込みました。

上腕とつなげてみるとこんな感じ。
左右差を作るための型取りに進みます。
2012年あけました [ズゴッホ]
プラモの福袋を買いに行ったらAGEのAGが入った福袋とゲイジング福袋しかありませんでした…
AGEのプラモ福袋でもHGなら買ったのに…

というわけで足の裏のモールドを仕上げました。
サフを吹いて足首完成。
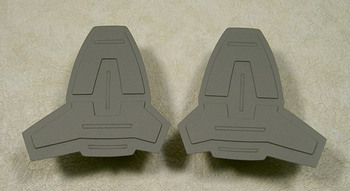
サフを吹いたので見えやすくなった足の裏。

そしてまた元旦なのにシリコーンゴムを流してる人…
精神と時の部屋はどこにあるのですか?
AGEのプラモ福袋でもHGなら買ったのに…

というわけで足の裏のモールドを仕上げました。
サフを吹いて足首完成。
サフを吹いたので見えやすくなった足の裏。

そしてまた元旦なのにシリコーンゴムを流してる人…
精神と時の部屋はどこにあるのですか?
足の裏のモールド [ズゴッホ]
0.5mmプラ板のツルツルした面同士を瞬間接着剤で接着してます。
足の裏の形を描きます。
切り出しました。
ピンバイスで穴開け。
二枚のプラ板の間にデザインナイフの刃を入れてペリッと剥がします。
穴を基準に切り込みを入れたプラ板を接着。

下側も同様に。

両サイドも同様に。
残すは凹モールド。